标量,向量,矩阵和张量
标量(scalar):一个标量就是一个单独的数。用斜体表示标量,如 $s∈R$.
向量(vector):一个向量是一列数,我们用粗体的小写名称表示向量。比如 $x$,将向量x 写成方括号包含的纵柱:
矩阵(matrix):矩阵是二维数组,我们通常赋予矩阵粗体大写变量名称,比如 $A$ 。如果一个矩阵高度是 $m$,宽度是 $n$,那么说 $\bf A\in \bf R ^{m \times n}$ 。一个矩阵可以表示如下:
张量(tensor):某些情况下,我们会讨论不止维坐标的数组。如果一组数组中的元素分布在若干维坐标的规则网络中,就将其称为张量。用 $A$ 表示,如张量中坐标为 $(i,j,k)$ 的元素记作 $A_{i,j,k}$ 。
转置(transpose):矩阵的转置是以对角线为轴的镜像,这条从左上角到右下角的对角线称为主对角线(main diagonal)。将矩阵 $A$ 的转置表示为 $A^⊤$ 。定义如下:
向量运算
加法
设 $\overrightarrow{v}=\begin{bmatrix} 1 \\ 2 \end{bmatrix}$,$\overrightarrow{w}=\begin{bmatrix}3\\ -1\end{bmatrix}$则$ \overrightarrow{v}+\overrightarrow{w}=\begin{bmatrix}4\\ 1\end{bmatrix}$
数乘
设 $\overrightarrow{v}=\begin{bmatrix} 3 \\ 1 \end{bmatrix}$,则$2\overrightarrow{v}=\begin{bmatrix} 3\times 2 \\ 1\times 2 \end{bmatrix}=\begin{bmatrix} 6 \\ 2 \end{bmatrix}$
矩阵-向量的乘积
矩阵是空间的线性变换,矩阵与向量相乘便是将向量进行线性变换的结果。

向量-向量的乘积
向量可以看成一个矩阵,这个矩阵将空间压缩到了一维空间。
向量$\overrightarrow{v}$在向量$\overrightarrow{w}$上的投影乘以向量$\overrightarrow{w}$的长度
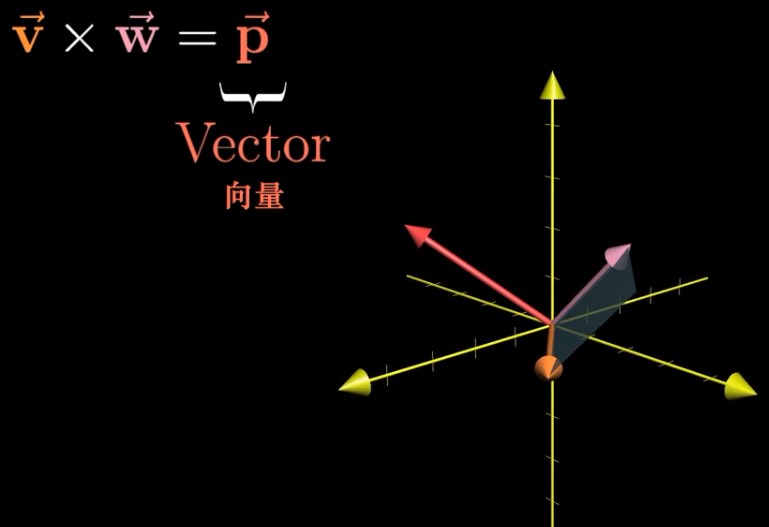
向量的叉积
向量的叉积是一个向量,向量 $\overrightarrow{p}$ 的方向垂直于 $\overrightarrow{w}$ 与 $\overrightarrow{v}$ 的平面,向量 $\overrightarrow{p}$ 的模是 $\overrightarrow{w}$ 与 $\overrightarrow{v}$ 所围成平面的面积(行列式)。
高维情况
$\overrightarrow{w}\times \overrightarrow{v}=\overrightarrow{p}$则
矩阵的运算
对向量的线性空间变换
矩阵加减法
对应位置的元素相加相减
矩阵数乘

矩阵转置
把矩阵A的行和列互相交换所产生的矩阵称为A的转置矩阵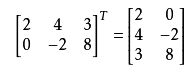
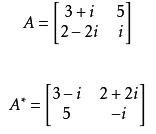
矩阵共轭

矩阵共轭转置
矩阵-向量的乘积
矩阵是空间的线性变换,矩阵与向量相乘便是将向量进行线性变换的结果。
矩阵-矩阵的乘积
矩阵是一种线性变换,矩阵与矩阵相乘便是将空间进行线性变换之后再次进行线性变换。矩阵与矩阵的乘积是一种对于空间的复合线性变换。变换吸纳从右侧开始一次向左侧进行变换。线性变换的过程如下图所示:

矩阵-矩阵的计算过程如下所示
计算过程去下图所示

矩阵-矩阵乘积的性质
- 结合律即 $(AB)C = A(BC)$
- 分配率即 $A(B + C) = AB + AC$
- 注意哦,矩阵乘法没有交换律,即 $AB ≠BA$
矩阵的逆
矩阵$A ∈ R^{n×n}$的逆,写作$A^{−1}$,是一个矩阵,并且是唯一的。是对矩阵$A$空间操作的逆变换。同时$AA^{−1}$也可以理解为矩阵$A$除以矩阵$A$ 等于单位矩阵$I$,

注意不是所有的矩阵都有逆。例如非方阵,是没有逆的。然而,即便对于一些方阵,它仍有可能不存在逆。如果$A^{−1}$存在,我们称矩阵$A$ 是可逆的或非奇异的,如果不存在,则称矩阵$A$不可逆或奇异。如果一个方阵$A$有逆$A^{−1}$,它必须满秩
矩阵的秩
矩阵的秩实际上的经过矩阵操作后空间的维数。在矩阵A中,非零子式的最高阶数称为矩阵A的秩,记为或秩。规定零矩阵的秩为零。
求解思路
$矩阵A\xrightarrow{初等行变换}阶梯形矩阵B。$则$r(A)=r(B)=$($B$中非零行的行数)
- 例子
-
求矩阵的秩。
解:
因此$r(A)=2$
矩阵的迹
方阵$A ∈ R^{n×n}$的迹,记作$tr(A)$,或可以省略括号表示成$trA$,是矩阵的对角线元素之和:
- 性质
- 对于$A ∈ R^{n×n}, trA = trA^T .$
- 对于$A,B ∈ R^{n×n}, tr(A + B) = trA + trB.$
- 对于$A ∈ R^{n×n}, t ∈ R, tr(t\ast A) = t\ast trA.$
1.对于方阵 $A,B,C,trABC = trBCA = trCAB$,即使有更多的矩阵相乘,这个性质也不变.
正交矩阵
如果$x^Ty = 0$,则两个向量 $x,y ∈ R^n$是正交的。对于一个向量$x ∈ R^n$,如果 $|x|=1$ 则是 $x$ 归一化的。对于一个方阵$U ∈ R^{n×n}$,如果所有列都是彼此正交和归一化的,(列就称为标准正交)则这个方阵是正交的(注意在讨论向量或矩阵时,正交具有不同的含义)。 根据正交和归一化的定义可得:
一个正交矩阵的逆矩阵的是它转置,正交矩阵必须是方阵